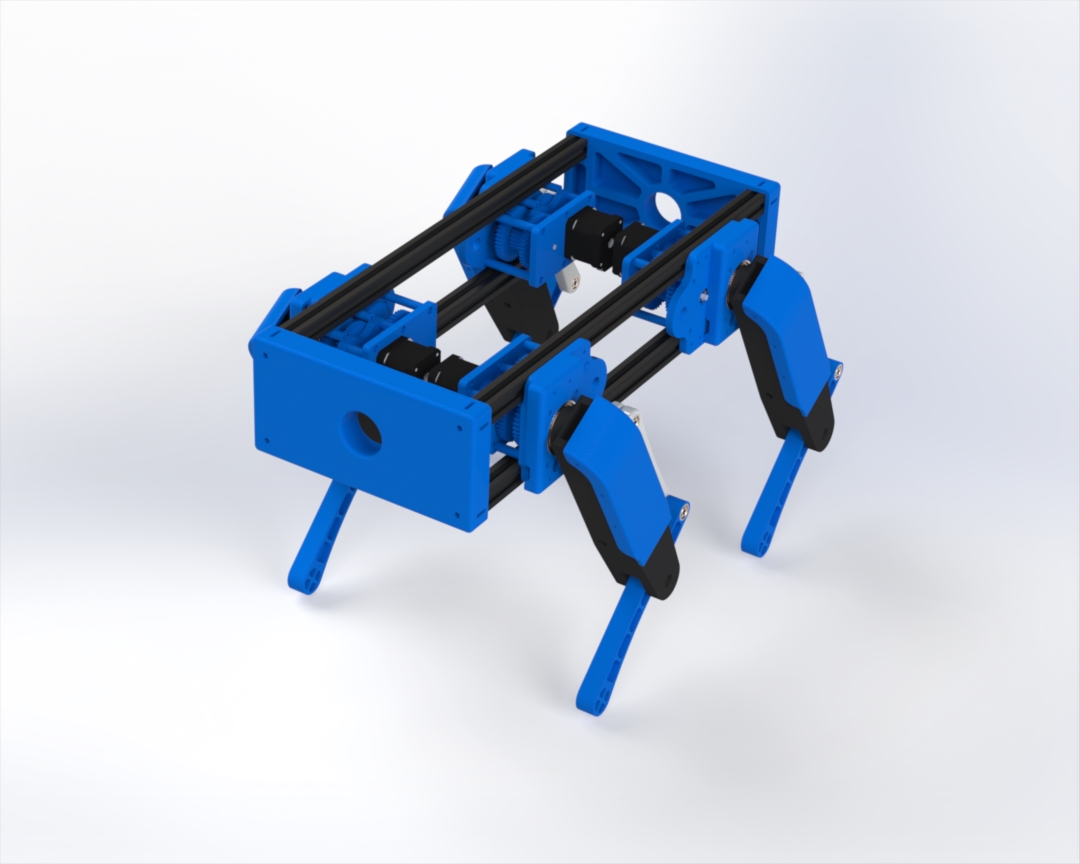
An educational quadruped robot developed for an institute, combining stepper and servo motors with closed-loop feedback for precise motion. The design used 3D-printed PLA+ and Resin-ABS materials, engineered for stability and modular learning applications.
The Robotic Dog is an educational quadruped developed for an institute to teach embedded systems, kinematics, and control engineering in a hands-on manner. The platform combines stepper and servo actuation with closed-loop position feedback on each leg joint, allowing repeatable gaits, precise leg trajectories, and demonstrable stability behaviour. The mechanical structure uses 3D-printed PLA+ for chassis and linkages plus Resin-ABS components for high-wear parts, balancing strength, cost and rapid iteration.

Development began with requirement capture and modular mechanical architecture so students could disassemble and study subsystems. Kinematic models were created in CAD and validated with simple simulations before hardware prototyping. Motor selection matched torque vs speed requirements for walking and payload; steppers provided accurate incremental motion while hobby servos handled smaller orientation tasks. Each joint includes sensors for closed-loop control (encoder/current sensing) integrated into microcontroller firmware that supports trajectory interpolation, gait sequencing and safety limits. Several CAD iterations used PLA+ for low-cost test parts; critical joints and mounting bosses were printed in Resin-ABS for higher durability and better surface finish. The electronics stack included modular motor drivers, a teacher-facing serial console for telemetry, and plug-and-play sensor nodes.

The finished platform became a central teaching tool in the institute’s robotics lab. Students used it to learn controller tuning, sensor fusion, and gait design; instructors leveraged the modular electronics to demonstrate closed-loop principles and fault-safe behaviour. The cost-optimized build and use of 3D printing allowed rapid replacement of worn parts and easy customization for student projects. The project also reduced instructor prep time by providing repeatable demos and a standardized set of exercises for labs and workshops.